 上 海 明 疆 工 贸 有 限 公 司
上 海 明 疆 工 贸 有 限 公 司 
日本MINEBEA(美蓓亚)电机
特价供应日本MINEBEA(美蓓亚) 42 微型步进电机,型号:17PW-M031-01L,安装尺寸:42 mm。电压12-24V,线型:4相6线,步距角:1.875°。 现货数量:2000台。
电机尺寸:

高清实物图



电机接线说明
黑色和白色为中心抽头;粉色、黄色、黑色为一组;蓝色、棕色、白色为一组。
电机具体接线确认方法
六根线一般是两组的,先用万用表表笔接其中一个线,然后依次点其他的线,凡是不通的都是另外一个组的,剩下的两个是跟你接的这个是一组的,一组里面的三个线,其中一个是中心抽头,用表笔反复测试三根线,两者之间电阻最大的是线圈的两头抽头,剩下的就是中心抽头的。这样就可以测出所有的线的定义了!结合这个电机,我测了一下,黑白两根线是中间抽头,其余的为电机的四相。还有一个问题就是如何确定驱动正转和反转的顺序问题。一般步进电机的标称值是没有电压这一个参数的,但也有很多的步进电机上面标了,如果是标了电压值,那么这个标称值就是最低驱动电压,比如说标称值为5V,那么一般就要5V以上的驱动电压才能带动负载。所以你要根据你的步进电机的标称来测试你的电机,我是用24V来进行测试的。
方法如下:1、先把两个线圈的中心抽头连接起来并接24V电源的正极(也可以是负极);
2、用电源负极去碰另外的4个线头,碰一次,先看电机是正转还是反转,如果是正转,那么再碰下一个,看是反的还是正的,反的就说明这个线不是你目前需要的,正的话,就是了,然后再重新来一次刚才的过程,确认一下。如此这般,就可以确定步进电机的驱动顺序了。这里还要介绍一个小细节,就是需要在电机轴上贴个小标签,以方便观察电机是否有转动,我刚开始没有贴标签,以为电机没有转动呢,比较泄气,后来想想不对劲,仿佛听到了电机内部有转动的响声啊,后来我就想是不是因为转动角度比较小,肉眼不容易察觉到,所以我就贴了一个指示标签在上面,这次果然发现碰线的时候,电机有转动的角度啦!
步进电机原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机内部结构:
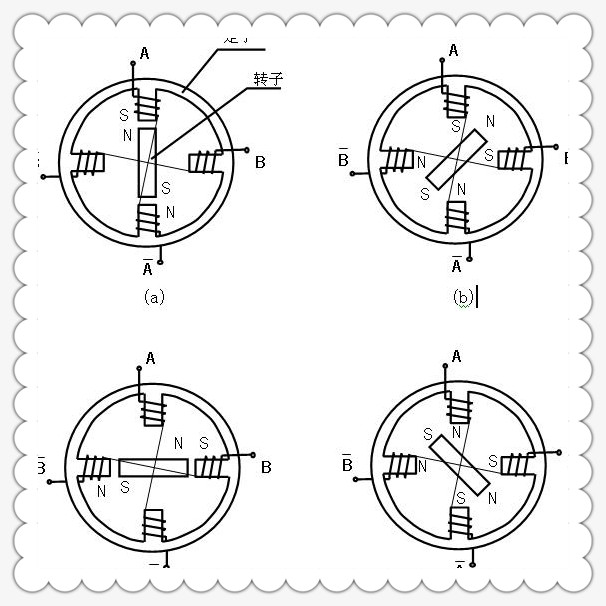
通过上图可知,A,~A是联通的,B和~B是联通。那么,A和~A是一组a,B和~B是一组b。 不管是两相四相,四相五线,四相六线步进电机。内部构造都是如此。至于究竟是四线,五线,还是六线。就要看A和~A之间,B和B~之间有没有公共端com抽线。如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
步进电机的接线:
如何区分组别,确认步进电机接线:应该用万用表打表。四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。所以,用万用表测,不连通的是一组。五线:由于五线中,a和b组的公共端是连接在一起的。用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。六线:a和b组的公共抽线com端是不连通的。同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机的分类:
步进电机在构造上有三种主要类型:
反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
反应式:定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
永磁式:永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。
